FANUC機器人汽車鋁壓鑄件自動研磨系統檢視原始碼討論檢視歷史
 |
FANUC機器人汽車鋁壓鑄件自動研磨系統隨着汽車輕量化要求和新能源汽車[1]產量的逐年提高,鋁合金材質的零件在汽車上的使用比例逐漸提高,其中鋁壓鑄件占汽車用鋁量約80%
案例背景介紹
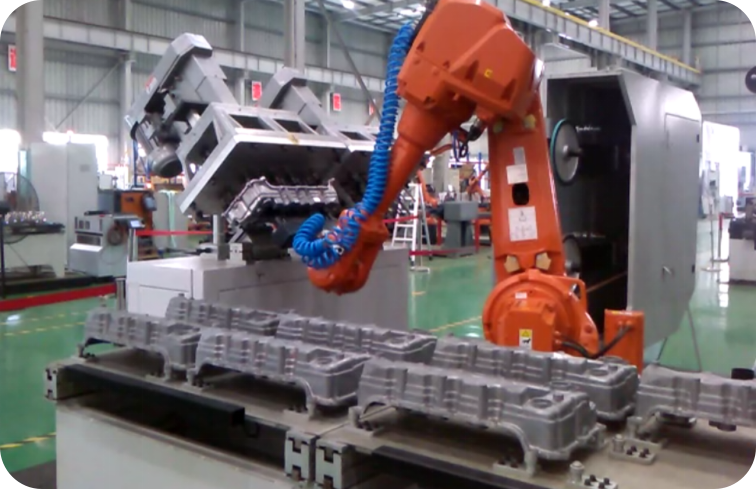
隨着汽車輕量化要求和新能源汽車產量的逐年提高,鋁合金材質的零件在汽車上的使用比例逐漸提高,其中鋁壓鑄件占汽車用鋁量約80%。隨着應用技術的進一步提升,鋁壓鑄件從驅動系統、傳動系統、制動系統等零部件位置逐漸延伸至引擎蓋、擋泥板、車門、後車廂、車頂、整車身等以衝壓焊接件為主的大型部位。因機器人可以提高工作效率和質量,避免人員作業安全隱患,對這些複雜形狀、存在壓鑄變形的鋁壓鑄件,選擇用機器人研磨工藝解決鋁壓鑄成型後零件裂紋、冷隔、凸起、起泡、 拉印、凹陷、飛邊等表面缺陷問題是客戶的首選。本案例項目應用了以2台FANUC R-2000iC/165F機器人為核心的研磨系統 對汽車引擎蓋內板以及車廂門內板進行去毛刺、打磨、拋光、清洗烘乾整套自動化流程。
1 背景
隨着汽車輕量化要求和新能源汽車產量的逐年提高,鋁合金[2]材質的零件在汽車上的使用比例逐漸提高,其中鋁壓鑄件占汽車用鋁量約80%。隨着應用技術的進一步提升,鋁壓鑄件從驅動系統、傳動系統、制動系統等零部件位置逐漸延伸至引擎蓋、擋泥板、車門、後車廂、車頂、整車身等以衝壓焊接件為主的大型部位。
因機器人可以提高工作效率和質量,避免人員作業安全隱 患,對這些複雜形狀、存在壓鑄變形的鋁壓鑄件,選擇用機器人研磨工藝解決鋁壓鑄成型後零件裂紋、冷隔、凸起、起泡、拉印、凹陷、飛邊等表面缺陷問題是客戶的首選。本案例項目應用了以2台FANUCR-2000iC/165F機器人為核心的研磨系統 對汽車引擎蓋內板以及車廂門內板進行去毛刺、打磨、拋光、 清洗烘乾整套自動化流程。
案例實施與應用情況
2 項目實施
2.1 關鍵技術
(1)濕式打磨,解決粉塵爆炸的隱患;
(2)離線編程,高精度的生成打磨軌跡;
(3)恆力浮動砂帶機、拋光機,保證缺陷均勻去除;
(4)研磨適配軟件;
(5)布局緊湊。
2.2 系統說明
系統由2台FANUCR-2000iC/165F機器人、1套上料台、 1套捲簾門、1套去毛刺機、2套拋光機、2套濕式砂帶機、2套工業防爆除塵器、2套換手台、1套中轉台、1套清洗烘乾一體 機、1套質檢台、1套防護房、光柵等安全防護設備組成。自動化研磨系統及其布局如圖1、圖2所示。
系統整體具有以下特點:
(1)採用雙機器人研磨,提高生產效率;
(2)由機器人控制伺服砂帶機協同打磨,柔性高;
(3)濕式砂帶機可以整體伺服旋轉,確保機器人以最好的姿態進行打磨;
(4)抓手可快速切換,適配多種零件;
(5)密閉設計,採用雙層鋁合金型材,防護全面;
(6)濕式打磨,去除粉塵,系統防爆性能好;
(7)占地6m×8m,布局緊湊。
2.3 質量標準和工藝參數
(1)打磨質量標準:所有表面不允許裂紋、冷隔;密封 面不允許有凸起區,表面粗糙度Rz80;接合面由熱裂引起的 凸起最大需小於0.5mm,氣泡直徑小於1mm,凹陷自由表面iv> 深度小於0.2mm,有材料堆積的區域,直徑小於5mm,深度 小於0.5mm;螺紋接觸面和螺栓頭接觸面凸起區最大Rz30;
(2)去毛刺機:防爆電主軸,功率4kW,轉速 8000RPM,輸出力矩達到5NM;
(3)拋光機:功率4kW,設備轉速3500RPM,能在 30mm的距離內保持0~10kg的恆力浮動;
(4)砂帶機:功率4kW,砂帶線速度40m/s,能在30mm的距離內保持0~10kg的恆力浮動;
(5)砂帶機伺服旋轉定位精度:≤1弧分。
2.4 操作流程
(1)人員放置未研磨件至上料台;
(2)機器人1抓取工件,將工件送至拋光機處,對工件正面部分可見面、小部分包邊面進行拋光;送至砂帶機區域,對工件正面大部分包邊面、接觸面打磨;
(3)機器人1將工件送至中轉台,機器人2反向抓取 ;
(4)機器人2將工件送至去毛刺機位置,對孔位進行去毛刺處理;再依次至拋光機、砂帶機區域進行零件反面的研磨作業;
(5)研磨完畢,將工件送至清洗烘乾一體機上料位置, 工件進入開始清洗及烘乾階段;
(6)人員下料並檢測工件粗糙度;
(7)更換零件生產時,機器人在換手台快速更換抓手。
2.5 安全與控制系統
由系統總控PLC控制所有設備之間的全部動作邏輯。
所有安全信號採用雙迴路硬接線方式。當機器人在運行 時,捲簾門下降、安全門鎖閉合,處於安全防護房之外的操作人員不能進入機器人運行區域,若要進行檢查或檢修,必須通過區域操作面板上「請求進入」按鈕,待機器人停到安全等待位置後按下「開門請求」按鈕才能被允許進入。
2.6 數據採集及監控系統
項目搭建了SCADA監控系統,對現場生產進行監控。主要功能包括以下兩個方面:
(1)數據採集:採集設備的當前狀態、系統報警和生產信息,便於生產統計和故障排查;
(2)生產及設備監控:主要顯示工藝設備數據、操作人員信息。
2.7 FANUCR-2000iC/165F機器人性能描述
(1)6軸關節運動,最大負重165kg,有效範圍2.65米, 重複定位精度±0.05mm;
(2)高可靠性、高性價比的萬能智能型機器人;
(3)高可靠性的FANUC伺服系統,實現長久高效的生產;
(4)更長的維護間隔周期,使用成本更低。
2.8 主要設備性能描述
(1)砂帶機:電機為粉塵防爆電機,含四個砂帶工位, 可以配置不同寬度不同目數的砂帶。設計有恆力浮動機構,可以根據設定值自動調節砂帶輪的進給量,實現柔性打磨。砂帶機帶有噴淋裝置實現濕式打磨,底部設計有噴淋液自動收集過濾循環系統,能夠有效過濾噴淋液中的粉塵。
(2)拋光機:電機為粉塵防爆電機,雙頭拋光機,雙頭位置中間距離可自動調節。拋光機上安裝有3M小旋風千絲輪,對較小凹凸不平區域進行拋光。小旋風可以根據拋光區域寬度選擇不同層數。拋光機設計有浮動力調節裝置,可實現恆力拋光。
(3)毛刺機:用於工件頂杆的去毛刺,設備包括電主軸、油冷機、碎屑收集盒和支撐架。收集盒用於收集碎屑,需要人工定期清理。
(4)工業防爆除塵器:最大體積流量3400L/min,最大真空23000Pa,過濾面積6.318cm²。採用防爆軟管將吸塵管道連接至拋光機,採用壽命高於通用馬達的EC-TEC馬達,提供持久的強勁吸塵動力。ABS塑料集塵容器帶有防火功能,適用於安全抽吸鋁塵。
(5)機器人手爪:夾爪動力為氣動,通過夾鉗夾持工件孔位進行夾取;兩種夾爪通過換手台實現自動更換;採用斷電保持閥以及手抓上的零件傳感器保證抓取安全性。
(6)工作站地板:研磨過程中飛濺的水流進入底板統一收集並從出水口流出,格柵踏板打開可清理。
(7)換手台:同時安放兩款手爪,設計有防塵蓋避免粉塵落入快換盤。
(8)中轉台:中轉台上設計有通用定位孔銷,定位工件,用於零件在兩台機器人之間中轉。
3 應用創新點
通過研究影響研磨質量的因素,項目應用了FANUC開發的輔助軟硬件,提高研磨質量和用戶體驗。
(1)遠程TCP: 機器人以固裝的工具上某一確定點作為坐標系參考點(TCP),從而機器人獲得相對於抓取工件固定的工具研磨路徑,通過遠程TCP可以將示教過程簡化、減少調試點位,當工藝路徑為曲線時,使用遠程TCP功能可以提升軌跡精度。
(2)力覺控制:FANUC力覺傳感器同時檢出施加在機器人工具前端任意方向的外力在XYZ方向上的6個力和力矩的分 量,如圖3所示,最大檢測範圍250kg。傳感器的仿形功能是以恆定的推壓力施加並跟蹤目標曲面,將推壓方向上施加的力作為控制的目標力而完成曲面的恆力研磨。
參考文獻
- ↑ 什麼是新能源汽車?新能源車有哪些類型?,搜狐,2021-12-30
- ↑ 鋁合金到底是什麼材料?,搜狐,2020-12-25