波束角檢視原始碼討論檢視歷史
 |
波束角是全國科學技術名詞審定委員會審定、公布的科技術語。
隨着社會制度的不斷發展與進步,中國的漢字也在不斷演化着,從最初的甲骨文[1]漸漸發展到了小篆[2],後來文化進一步發展後,才出現了」漢字」這種說法。
名詞解釋
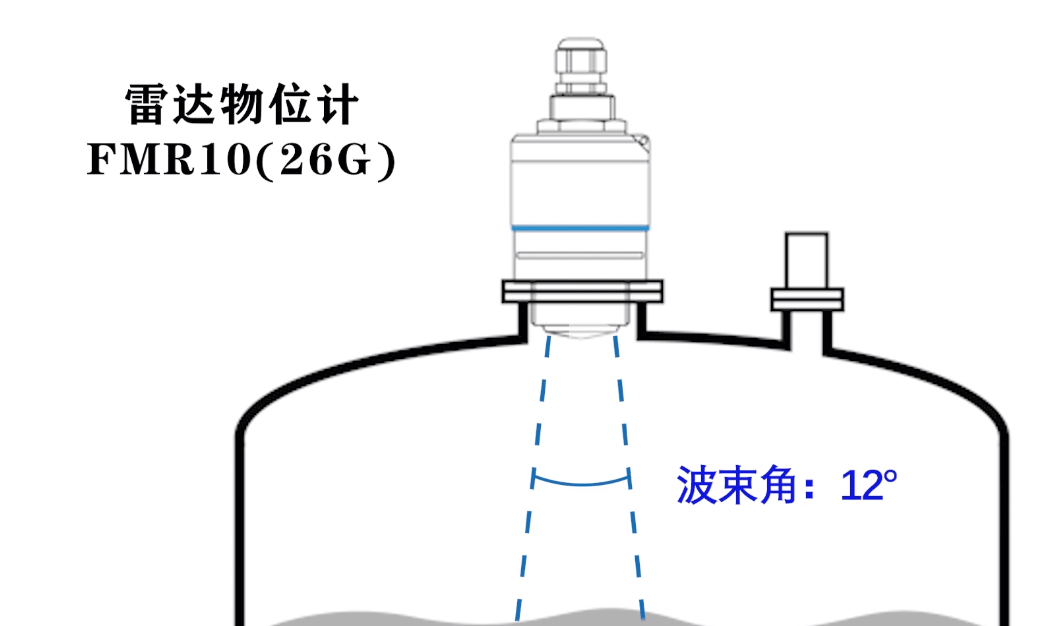
波束角是指以傳感器中軸線的延長線為軸線,由此向外,至能量強度減少一半(-3dB)處,這個角度被稱為波束角。
波束角是傳感器在發射超聲波時存在的概念。超聲波傳感器在發射超聲波時沿傳感器中軸線的延長線 (垂直於傳感器表面)方向上的超聲射線能量最大。由此向外其他方向上的聲波能量逐漸減弱。
小波束角超聲測距儀的研製
超聲測距傳感器價格低廉,性能幾乎不受光線、粉塵、煙霧、電磁干擾和有毒氣體的影響,且使用方便,故在倒車雷達等領域得到了廣泛應用。倒車雷達所採用的超聲傳感器一般採用大波束角設計,旨在擴大探測範圍,但同時也產生了干擾信號,增加了虛警概率。隨着超聲測距傳感器波束角的減小,超聲波的定向傳播能力增強,系統探測準確度和抗干擾能力也隨之大大提高。因此,研製小波束角超聲測距儀具有深遠的現實意義和應用價值。
總體設計
筆者研製的小波束角超聲測距儀由超聲傳感器,發射/接收電路、單片機處理電路及PC構成,系統總體結構如圖2所示。超聲傳感器用來實現電能與聲能的相互轉換;發射電路用於產生一定頻率的交變電壓作為傳感器工作電源,驅動傳感器向外發射超聲信號;接收電路部分對回波信號進行放大、濾波,單片機處理電路則用於產生選通信號並對回波信號進行處理,測量結果在PCIV界面中實時顯示。本系統的核心是小波束角超聲傳感器的研製。
功能單元設計
超聲傳感器一般採用波束寬度良 評價其指向性。波束寬度是指主波束指向性函數在主極大兩側下降到主極大值的0.707(半功率點)的夾角,波束寬度越小,傳感器的指向性就越強;反之,越弱。
波束角偏差對多波束測量的影響及校正編輯 播報
多波束測深系統已經成為海洋測量的主要設備之一。為了確保多波束測量的高精度、高效率等優點,在測量過程中就必須嚴格消除系統內部誤差和各項外部影響因素。多波束系統的參數校正就是為消除系統內部誤差而引入的誤差改正的基本方法。波束角偏差是多波束系統內部誤差,它是由於換能器基陣基元之間的物理相位與間距誤差綜合導致的,對整個聲納系統的水深測量與定位精度都有着重要的影響。但在通常的參數校正中,作業人員一般只進行多波束系統換能器橫向偏差、縱向偏差以及定位系統的時間延遲、羅經艏向偏差的校正,很少關注波束角偏差的校正。然而波束角偏差是影響多波束系統測量精度的主要因素之一,嚴重時導致勘測數據出現沿測線方向的條帶狀偽地形,測量實時監控窗上出現很明顯的凸凹偽地形。SIMRAD公司為EM系列多波束系統配置的Calibrate多參數校準軟件對波束角偏差的校正十分有效。
參考文獻
- ↑ 漢字小時候|一個文字,一段歷史,搜狐,2020-11-24
- ↑ 書法丨原來小篆是中國第一個也是唯一一個由國家規定的標準漢字形態!,搜狐,2017-06-05