適時四驅
| 適時四驅 |
 |
|
中文名:適時四驅 別 名:實時四驅 系 統:四驅模式 載 體:汽車 |
適時四驅只有在適當的時候才會轉換為四輪驅動,而在其它情況下仍然是兩輪驅動的驅動系統。系統會根據車輛的行駛路況自動切換為兩驅或四驅模式,不需要人為操作。
適時四驅有別於需要手動切換兩驅和四驅的分時四驅,以及所有工況下都是四輪驅動的全時四驅。[1]
目錄
誕生背景
汽車的每個驅動輪之間都必須有差速器才能實現高附着路面上的轉彎,這是因為不同車輪在轉彎時的轉速不同導致的,差速器就是消除這種轉速差速的部件,全時四驅就是基於這個理念而誕生的,它的中央差速器的作用就是完成消除前後軸轉速差的工作,因此它可以實現任何時候都保證四輪驅動。分時四驅是不能實現在四驅狀態下公路過彎的,因為它沒有中央差速器,因此它只能在越野的時候手動切換為適時模式,常規情況下只能採用兩輪驅動。當在市場上認為全時四驅結構過於複雜,許多車型不方便布置,而且傳動率不夠高;而分時四驅需要手動切換很麻煩,同時對駕駛員的技術要求很高,無法做到更廣泛普及的時候,可以自動切換兩驅和四驅的適時四驅技術就應運而生了。
發展沿革
適時四驅誕生開始,發展大致經歷了三個階段,每個階段的構造和性能都有所區別。早期由於適時四驅的技術有限,採用適時四驅的車型確實無法和全時四驅相比,無論在通過性還是操控極限方面,它的性能都只能介於兩驅和全時四驅之間。隨着適時四驅技術的進步,第三代適時四驅性能獲得了大幅度的提升,其工作原理也有了很大的改變。
第一代
早期的適時四驅是純機械的,最典型的代表車型就是本田的CR-V,它通過液力耦合器來實現自動向後輪分配動力。這種適時四驅的結構比較簡單,不需要電控元件,但由於它需要前後車輪出現明顯轉速差的時候液力耦合器才能介入,因此它的響應速度比較慢,無論是在提高越野性能還是通過性能的時候,都會明顯遜色於全時四驅。
第二代
第二代適時四驅開始通過電子裝備來解決之前機械式帶來的問題。在這一代適時四驅中,中央差速裝置被多片式離合器所取代,它的開與合則由ECU來掌控。前後車輪的輪速傳感器會將實時的輪速反饋給ECU,一旦ECU檢測到前輪的轉速比後輪快,就會迅速發出指令給多片式離合器,從而向後軸傳遞動力。由於有了電控系統的加入,此時的適時四驅在響應速度上大幅度提高,而且在分配動力比例上,也可以做到智能化控制。另外多片離合器在完全結合時可以達到硬連接的效果,因此不僅它的傳動效率要比機械式的更高,而且使得鎖死差速裝置成為可能。
第三代
第三代適時四驅是以歐洲新款適時四驅車型採用的,以第三代HALDEX四驅為代表的智能電子式適時四驅。這種適時四驅增加了預載功能,可以通過前輪的運轉情況來實現預判斷,在前輪有打滑趨勢之前就預先接通,理論上已經做到與全時四驅類似的效果。另外這種適時四驅還可以做到正常行駛情況下,前後軸之間的動力分配恆定在90:10。
系統分類
第一種是以機械的粘性聯軸節式適時四驅,第二種是電控多片離合器式適時四驅;第三種是智能電子式適時四驅。
機械聯軸式
這種四驅的核心部件是液力耦合器,在這個耦合器中充滿了硅油,輸入軸和輸出軸一端與浸沒在硅油中的葉輪相連,另一端則與前後差速器相連。在正常行駛的時候,前後車輪保持相同的速度運轉,液力耦合器的兩個軸之間不存在轉速差。當前輪出現打滑的時候,轉速會超過後輪,從而導致耦合器里的兩個葉輪之間出現轉速差,這種轉速差會導致硅油升溫而粘度迅速升高,從而將動力傳遞給後輪。
多離合器式
這種適時四驅的核心部件是多片離合器式限滑差速器。多片離合器式差速器主要是通過濕式離合片產生差動扭矩,而離合器的壓緊與分離是靠電子系統來控制的。車輛在正常行駛時,驅動形式為前驅,如當系統檢測到車輪打滑時,通過電子系統控制離合器壓緊,進而將部分動力傳遞至後輪,理論上電腦會根據車速與路況自動分配前後軸扭矩,以達到抓地性能最優化。不過這種四驅系統通常在主驅動輪失去抓地力(打滑)後,另外的驅動輪才會被動介入,所以它的響應速度較慢。
智能電子式
這種適時四驅可以根據車輪打滑或轉向信息,精確控制智能分動器向四輪傳遞出大小可控的扭矩,提高整車加速性、穩定性和燃油經濟性。在停車時,傳遞給前輪扭力非常低或為零,提高了操作的便利和舒適性。在ABS工作時,短時間內迅速切斷前輪動力傳遞,確保剎車時整車的穩定性。加速時,在四個輪上實現最大的牽引力,加速性更好。在濕滑路面上時,與其他安全系統通訊,實現最佳的牽引力和安全性能。
優劣對比
優點
相比全時四驅,適時四驅的結構要簡單得多,這不僅可以有效的降低成本,而且也有利於降低整車重量。由於適時四驅的特殊結構,它更適合於前橫置發動機前驅平台的車型配備,這使得許多基於這種平台打造的SUV或者四驅轎車有了裝配四驅系統的可能。前驅平台相對於後驅平台更有利於拓展車內空間、傳動效率更高、傳動系統的噪音更小。這些優點對於小型SUV,特別是是發動機排量較小的SUV來說顯得尤其重要。
由於全時四驅的結構複雜,傳動部件多而重,會極大地降低動力的響應性,如果小排量發動機裝備全時四驅,會明顯感覺得到功力不足。不僅如此,由於全時四驅的功耗大,顯著影響了汽車的經濟性,而適時四驅可以很好地兼顧經濟性。
缺點
適時四驅也存在缺點,絕大多數適時四驅在前後軸傳遞動力時,會受制於結構本身的缺陷,無法將超過50%以上的動力傳遞給後軸。相對來說,適時四驅車的主動安全性不如全時驅動車高。另外,適時四驅系統的前後軸基本上都採用開放式差速器,如在一些複雜路段,出現單側兩個車輪打滑時,也是無法脫困的。所以這種四驅系統無法應對強度大的越野路段。
使用車系
全球採用適時四驅技術的車型大致有兩大分支:一是以採用瑞典HALDEX公司提供的四驅為代表的歐系車,如大眾的途觀、帕薩特R36、高爾夫R20、奧迪的TT3.2quttro、A3quttro,福特德國的KUGA,路虎的神行者2等等;另一分支則是以日本JECKT公司提供的四驅為代表的日系車,像豐田的RAV4和漢蘭達等等。
分類
目前,四驅汽車的驅動系統一般分為:分時四驅、全時四驅和適時四驅。
分時四驅是由駕駛者手動切換的驅動模式,駕駛者可通過接通或斷開分動器來選擇兩輪驅動或四輪驅動模式。這是SUV車型中最常見的驅動模式,其優點是既能保證車輛的動力性和通過性,又能兼顧燃油經濟性,略顯不足的是駕駛者需要自行判斷路況,手動操作驅動模式。
全時四驅指的是車輛在整個行駛過程中一直保持四輪驅動的模式。這種驅動模式擁有較好的越野和操控性能,但它不能根據路面情況做出扭矩分配的調整,油耗偏大,經濟性差。
適時四驅又稱為實時四驅,是最近幾年發展起來的技術,它由電腦芯片控制兩驅與四驅的切換。該系統的顯著特點就是它在繼承全時四驅和分時四驅的優點的同時彌補了它們的不足。它能自行識別駕駛環境,根據駕駛環境的變化控制兩驅與四驅兩種模式的切換。在顛簸、多坡多彎等附着力低的路面,車輛自動設定為四輪驅動模式,而在城市路面等較平坦的路況上,車輛會自行切換為兩輪驅動。
系統比較
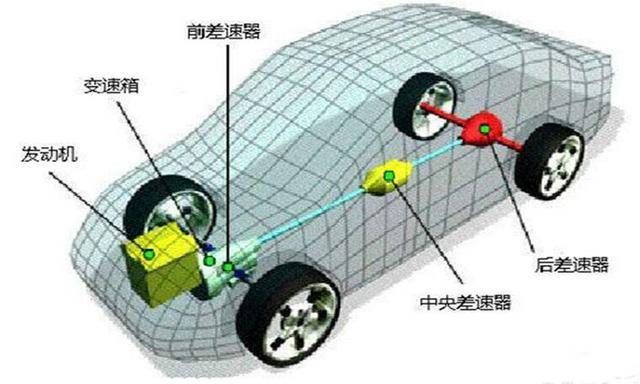
全時四驅系統內有三個差速器:除了前後橋各有一個差速器外,在前後驅動軸之間還有一個中央差速器。這使全時四驅避免了半時四驅的固有問題:汽車在轉向時,前後輪的轉速差會被中央差速器吸收。所以,全時四驅在硬路面、下雨時有更可靠的四輪抓着力,比分時四驅優越。但到了冰雪、沼澤地就必須把中央差速器鎖上;回到不滑的硬路,馬上要把中央差速器鎖解開。
有些全時四驅的中央差速器比較先進,一般情況下它可以把汽車動力平分給前後軸。當車輪出現打滑時,它會自動把中央差速器鎖上。這種系統在小車上表現很好,但在大四驅車上,它就沒有差速器手動鎖來得可靠。
相比全時四驅,適時四驅的結構要簡單得多,這不僅可以有效也降低成本,而且也有利於降低整車重量。由於適時四驅的特殊結構,它更適合於前橫置發動機前驅平台的車型配備,這使得許多基於這種平台打造的SUV或者四驅轎車有了裝配四驅系統的可能。前驅平台相對於後驅平台本身就有着諸多優勢,如更有利於拓展車內空間、傳動效率更高、傳動系統的噪音更小等等。這些優點對於小型SUV,特別是是發動機排量較小的SUV來說顯得尤其重要。當然,適時四驅的缺點仍然是存在的,目前絕大多數適時四驅在前後軸傳遞動力時,會受制於結構本身的缺陷,無法將超過50%以上的動力傳遞給後軸,這使它在主動安全控制方面,沒有全時四驅的調整範圍那麼大;同時相比分時四驅,它在應對惡劣路面時,四驅的物理結構極限偏低。
分時四驅靠操作分動器實現兩驅與四驅的切換。由於分動器內沒有中央差速器,所以分時四輪驅動的汽車不能在硬地面上使用四驅,特別是在彎道上不能順利轉彎。這是因為分時四驅在分動器內沒有中央差速器,而無法把前後軸的轉速調整所致。汽車轉向時,前輪轉彎半徑比同側的後輪要大,因此前輪的轉速要比後輪快,以至四個車輪走的路線完全不一樣,所以分時四驅只可以在車輪打滑時才掛上四驅,一回到摩擦力大的鋪裝路面應馬上改回兩驅。
5分鐘看懂:什麼是全時、適時、分時四驅?
參考資料
- ↑ 常見的四驅形式有哪些,汽車之家